

About Me
My name is Markus and I am a post-doctoral research associate at the University of Glasgow where I am part of the DIFAI project. My research focuses on Active Inference (or the 'Free energy principle'), a novel theoretical framework of how living beings interact with the world. Me and my colleagues study how Active Inference can be applied to model humans while they interact with computers in a variety of scenarios. For my research, I draw from my background in Optimal Feedback Control, Computational Interaction (with focus on Reinforcement Learning and biomechanical modeling).
When I'm not working on my research, I enjoy bouldering, dancing, playing board games or exploring the Scottish Highlands. I believe that having a diverse set of experiences and perspectives is essential for being a well-rounded researcher.
Projects
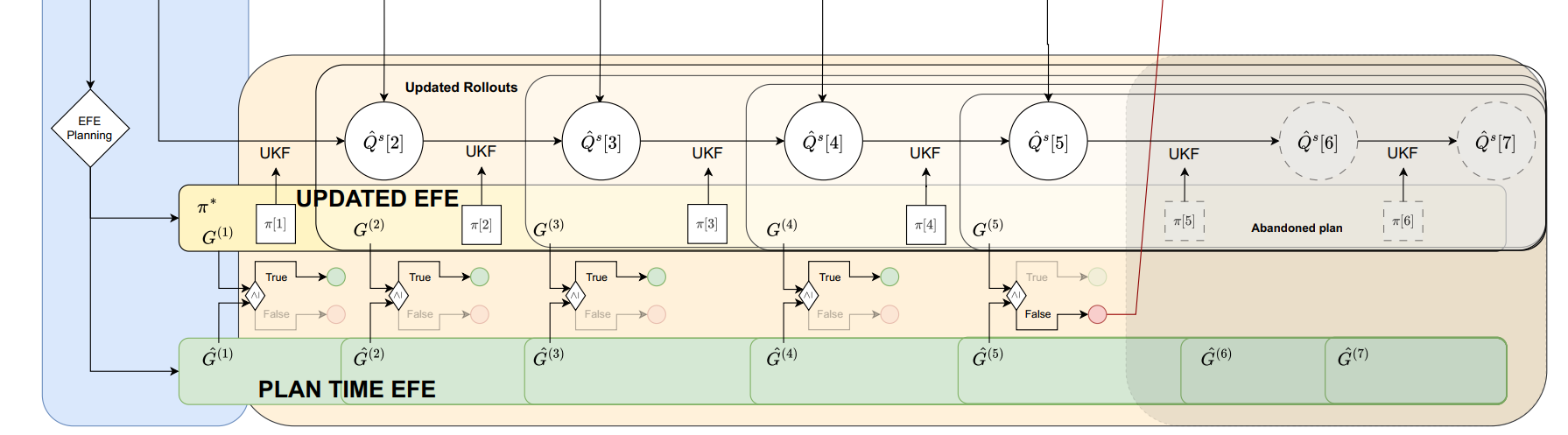
Intermittent Active Inference
In this paper, we introduce Intermittent Active Inference (IAIF)--a variant of active inference in which agents update plans only when prediction error exceeds a predefined threshold or the expected free energy surpasses prior estimates, indicating that following the current plan is not viable anymore. This is a practical approach, which can have significant computational savings, but is also motivated by the fact that natural agents like humans often update their control strategies intermittently rather than continuously, leading to a different style of behavioural variability. We show that in simulations of a mouse pointing task, intermittent planning reduces computational cost while maintaining performance, making IAIF attractive for practical modelling workflows.
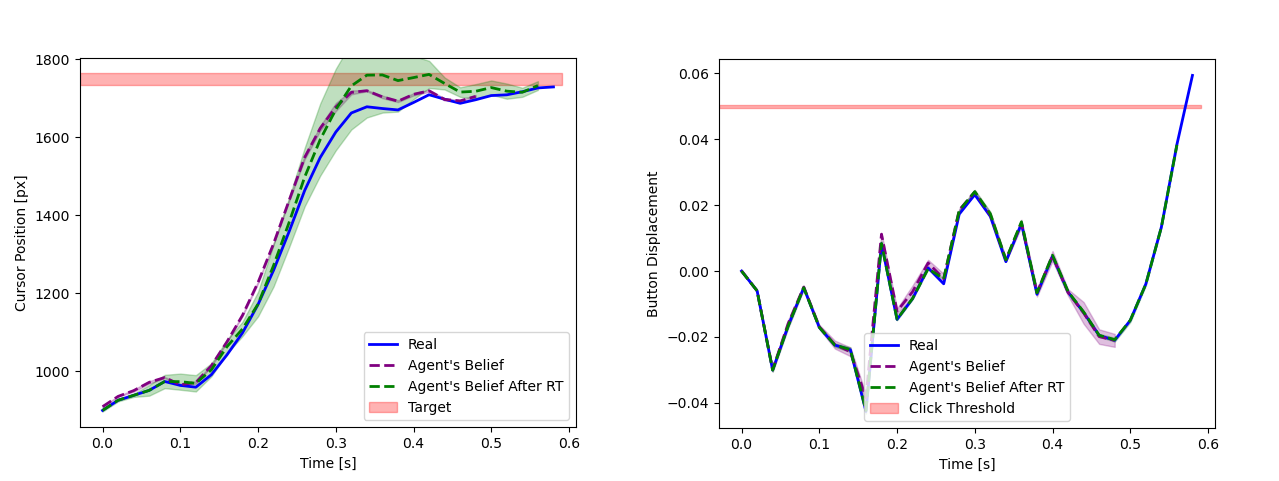
An Active Inference Model of Mouse Point-and-Click Behaviour
This study introduces an Active Inference (AIF) model for simulating human-like mouse pointing and clicking by minimizing Expected Free Energy instead of using traditional control methods. The AIF agent produces realistic, probabilistical movements that adapt to different target difficulties without parameter tuning, incorporating predictive delay compensation.
SIM2VR: Towards Automated Biomechanical Testing in VR (accepted to UIST 2024)
In this paper, we introduce SIM2VR, a system that aligns biomechanical user simulation with a given VR application by establishing a continuous closed loop between the two processes. This, for the first time, enables training simulated users directly in the same VR application that real users interact with.

Simulating Interaction Movements via Model Predictive Control (SimMPC)
We present a Model Predictive Control framework to simulate interactions with computers, in particular, mid-air pointing, employing a second-order muscle model and comparing different cost functions, with results showing high accuracy in predicting individual users' movements, and providing the publicly available SimMPC framework and code to aid HCI researchers and designers.
Breathing Life Into Biomechanical User Models (User in the Box - UitB)
In this work we propose an approach for generative simulation of interaction with perceptually controlled biomechanical models using deep reinforcement learning to learn control policies and apply it to four HCI tasks of increasing difficulty.
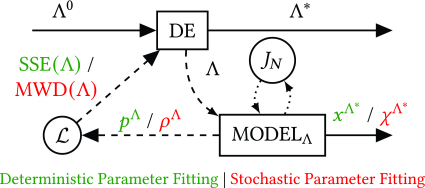
Optimal Feedback Control for Modeling Human–Computer Interaction (OFC4HCI)
We apply optimal feedback control theory to understand human-computer interaction in pointing tasks, proposing a single dynamical system interpretation of the human body and computer dynamics, and introduce a procedure and Python toolbox to identify parameters that best explain observed user behavior, concluding that OFC presents a powerful framework for HCI to understand and simulate motion of the human body and interface.

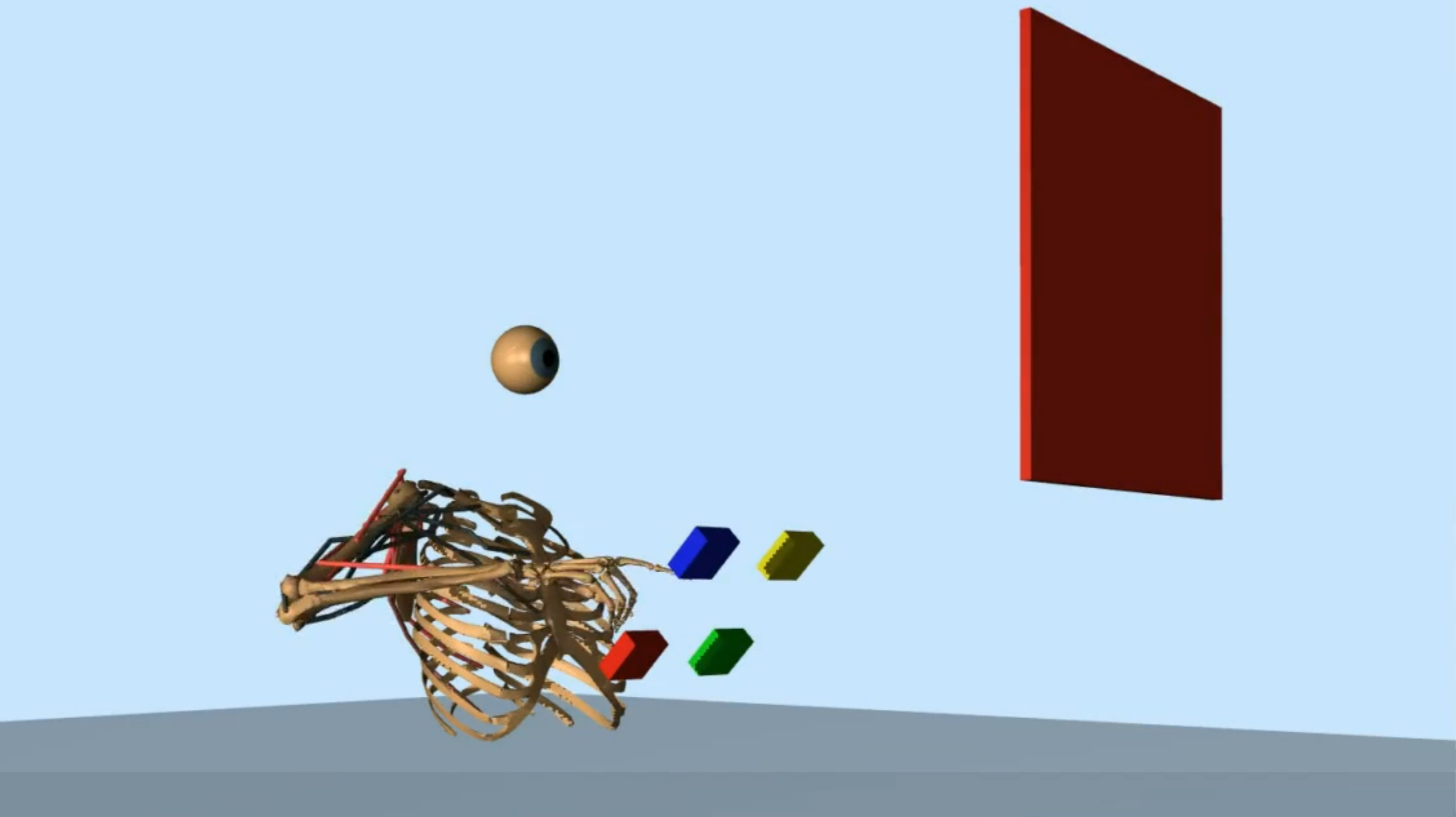
Reinforcement Learning Control of a Biomechanical Model of the Upper Extremity
We explore whether simplified assumptions can accurately predict human reaching movements in a full skeletal model. Using reinforcement learning, we train a control policy to move its finger towards 3D targets. Our state-of-the-art biomechanical model implemented in the fast physics simulation MuJoCo incorporates signal-dependent and constant motor noise. Remarkably, these simple assumptions, coupled with the objective of minimizing movement time, successfully reproduce key phenomena such as Fitts' Law and the 2/3 Power Law.
Teaching
I also enjoy teaching and supervising projects or bachelor/master theses. Below you can find some of the works my students have done in the past:
Simulating a Marsrover with MuJoCo
In this project, the students built a rover model that is controlled to find the optimal path over a surface modelled with Perlin-noise, including visual obstacle detection.
Students: J. Bodenschlägel, J. Michel, M. Reimann, M. Scharf, J. Stenglein, B. Zahn
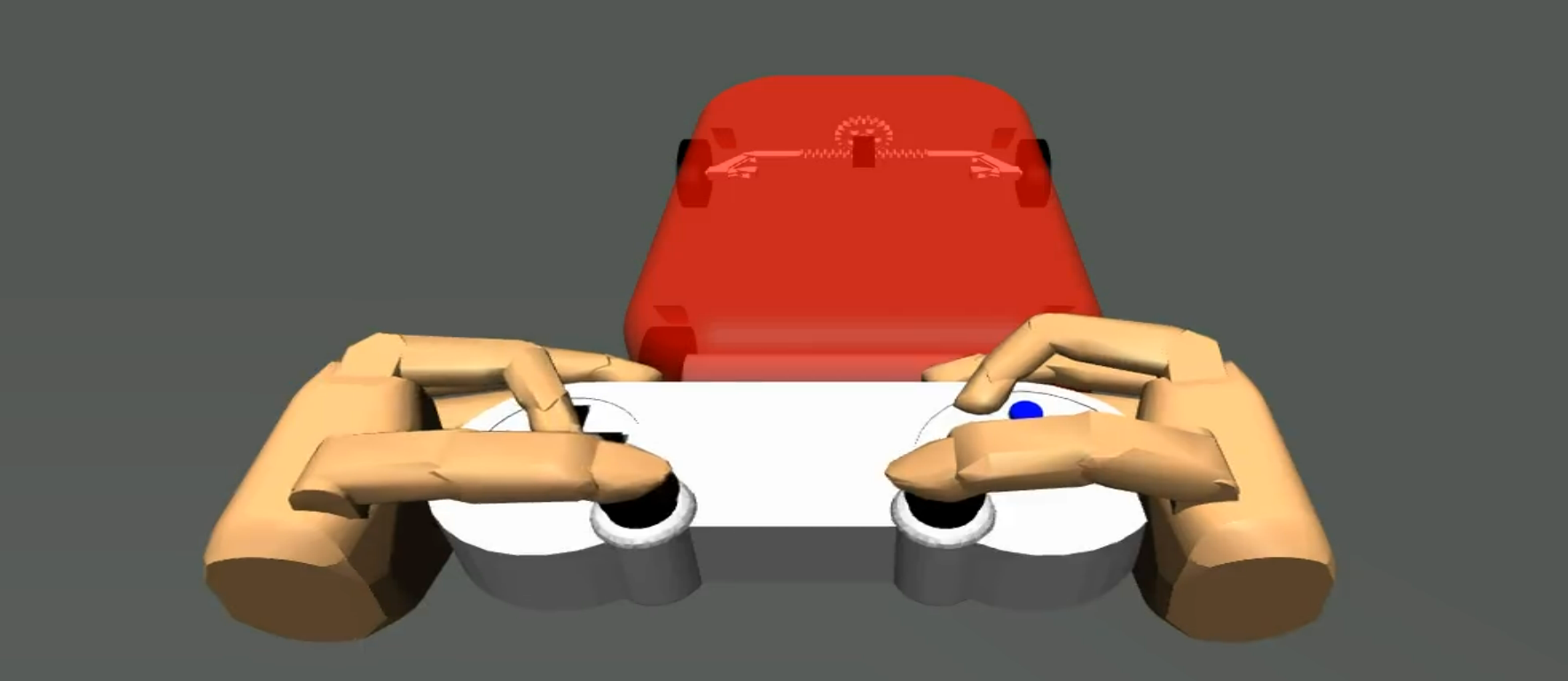
Simulation of a Game Controller and Remote Car with MuJoCo
In this project, the students built a functioning game controller model with optimized joysticks and a remote controlled car in MuJoCo.
Students: D. Ermer, F. Schäffler, J. Herrmann, L. Müller

Implementation and Evaluation of Ray-Casting Techniques with Motion Caption
In this master thesis, the student implemented different ray-casting techniques in an experimental Unity environment and ran a user study to collect motion data.
Student: M. Hacker